code
نسخ
اقتباس
عرض
تنزيل
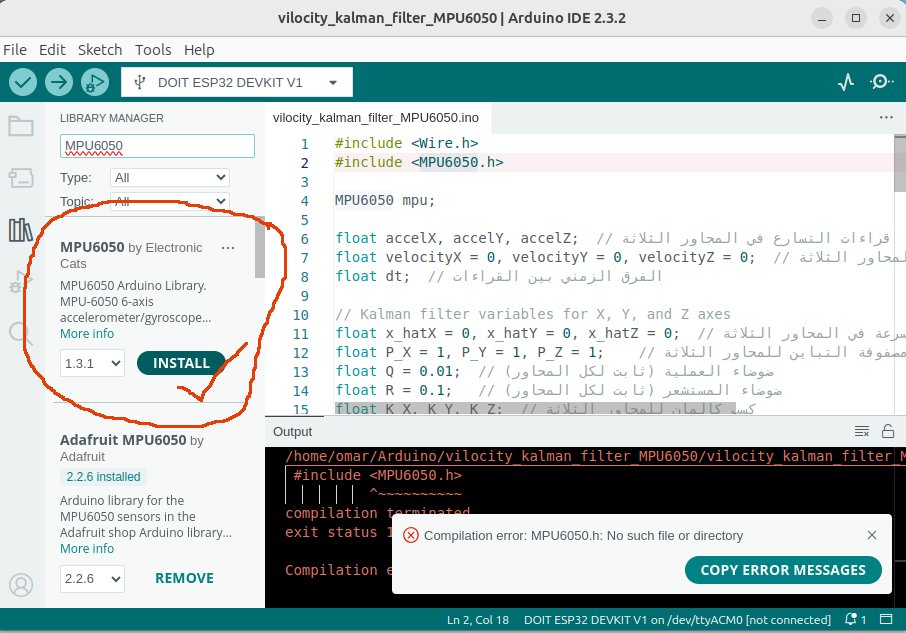
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
float accelX, accelY, accelZ; // قراءات التسارع في المحاور الثلاثة
float gyroX, gyroY, gyroZ; // قراءات الجيروسكوب (الدوران الزاوي) في المحاور الثلاثة
float temperature; // درجة الحرارة
float velocityX = 0, velocityY = 0, velocityZ = 0; // السرعات في المحاور الثلاثة
float dt; // الفرق الزمني بين القراءات
// Kalman filter variables for X, Y, and Z axes
float x_hatX = 0, x_hatY = 0, x_hatZ = 0; // التقديرات المتوقعة للسرعة في المحاور الثلاثة
float P_X = 1, P_Y = 1, P_Z = 1; // مصفوفة التباين للمحاور الثلاثة
float Q = 0.01; // ضوضاء العملية (ثابت لكل المحاور)
float R = 0.1; // ضوضاء المستشعر (ثابت لكل المحاور)
float K_X, K_Y, K_Z; // كسب كالمان للمحاور الثلاثة
unsigned long lastTime = 0;
void setup() {
Serial.begin(9600);
Wire.begin();
mpu.initialize();
if (!mpu.testConnection()) {
Serial.println("MPU6050 connection failed!");
while (1);
}
}
void loop() {
unsigned long currentTime = millis();
dt = (currentTime - lastTime) / 1000.0; // تحويل الوقت إلى ثواني
lastTime = currentTime;
// الحصول على بيانات التسارع من MPU6050
accelX = mpu.getAccelerationX() / 16384.0; // قراءة التسارع في المحور X
accelY = mpu.getAccelerationY() / 16384.0; // قراءة التسارع في المحور Y
accelZ = mpu.getAccelerationZ() / 16384.0; // قراءة التسارع في المحور Z
// الحصول على بيانات الجيروسكوب (الدوران الزاوي)
gyroX = mpu.getRotationX() / 131.0; // قراءة الدوران الزاوي في المحور X
gyroY = mpu.getRotationY() / 131.0; // قراءة الدوران الزاوي في المحور Y
gyroZ = mpu.getRotationZ() / 131.0; // قراءة الدوران الزاوي في المحور Z
// الحصول على درجة الحرارة من المستشعر
temperature = mpu.getTemperature() / 340.0 + 36.53; // تحويل قيمة القراءة إلى درجة مئوية
// *** فلتر كالمان للمحور X ***
x_hatX += accelX * dt; // التنبؤ بالسرعة بناءً على التسارع
P_X += Q; // تحديث التباين بناءً على الضوضاء
K_X = P_X / (P_X + R); // حساب كسب كالمان
x_hatX = x_hatX + K_X * (accelX - x_hatX); // تحديث السرعة المتوقعة
P_X = (1 - K_X) * P_X; // تحديث التباين
// *** فلتر كالمان للمحور Y ***
x_hatY += accelY * dt; // التنبؤ بالسرعة بناءً على التسارع
P_Y += Q; // تحديث التباين بناءً على الضوضاء
K_Y = P_Y / (P_Y + R); // حساب كسب كالمان
x_hatY = x_hatY + K_Y * (accelY - x_hatY); // تحديث السرعة المتوقعة
P_Y = (1 - K_Y) * P_Y; // تحديث التباين
// *** فلتر كالمان للمحور Z ***
x_hatZ += accelZ * dt; // التنبؤ بالسرعة بناءً على التسارع
P_Z += Q; // تحديث التباين بناءً على الضوضاء
K_Z = P_Z / (P_Z + R); // حساب كسب كالمان
x_hatZ = x_hatZ + K_Z * (accelZ - x_hatZ); // تحديث السرعة المتوقعة
P_Z = (1 - K_Z) * P_Z; // تحديث التباين
// عرض البيانات على الشاشة
Serial.print("Acceleration X: ");
Serial.print(accelX);
Serial.print("\t Y: ");
Serial.print(accelY);
Serial.print("\t Z: ");
Serial.println(accelZ);
Serial.print("Estimated Speed X: ");
Serial.print(x_hatX);
Serial.print("\t Y: ");
Serial.print(x_hatY);
Serial.print("\t Z: ");
Serial.println(x_hatZ);
// عرض الدوران الزاوي
Serial.print("Gyro X: ");
Serial.print(gyroX);
Serial.print("\t Y: ");
Serial.print(gyroY);
Serial.print("\t Z: ");
Serial.println(gyroZ);
// عرض درجة الحرارة
Serial.print("Temperature: ");
Serial.println(temperature);
delay(100); // تأخير لتحديث البيانات
}