ESP8266 NodeMCU


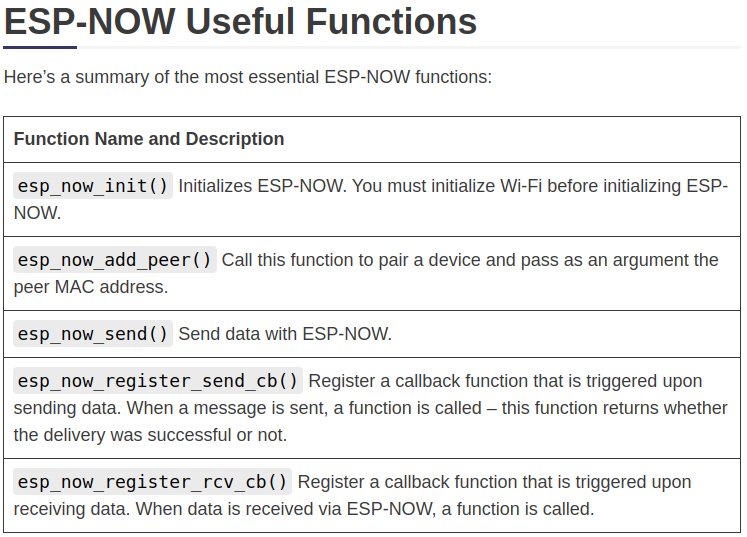
ESP-NOW communication protocol
This without using Wi-Fi
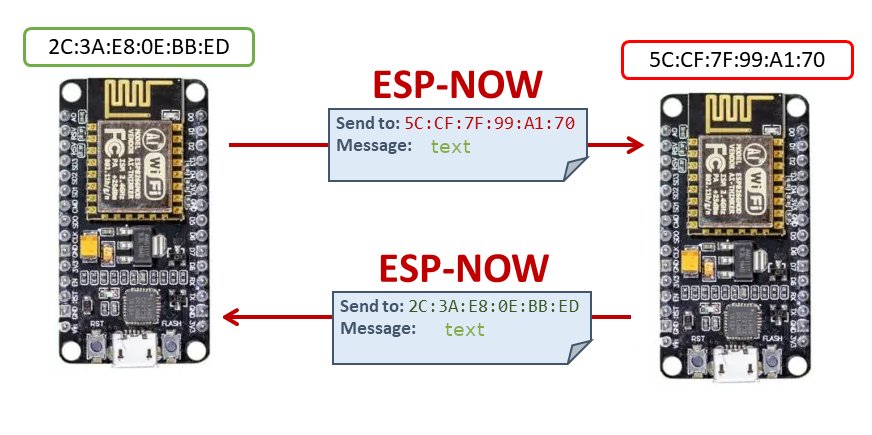
This protocol enables multiple devices to talk to each other without using Wi-Fi. This is a fast communication protocol that can be used to exchange small messages (up to 250 bytes) between ESP32 boards. ESP-NOW is very versatile and you can have one-way or two-way communication in different arrangements.

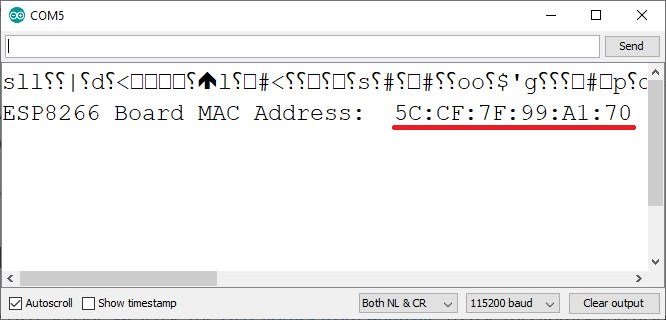
Getting the Boards MAC Address
code
نسخ
اقتباس
عرض
تنزيل
After uploading the code, press the RST/EN button, and the MAC address should be displayed on the Serial Monitor.
ESP1 code to send and receive from ESP2
code
نسخ
اقتباس
عرض
تنزيل
ESP2 code to send and receive from ESP1
code
نسخ
اقتباس
عرض
تنزيل